Alexandria University
June 2016 – September 2016
Aim:
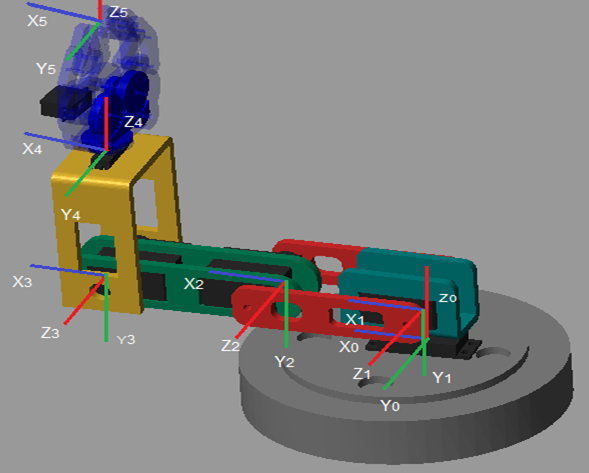
Creating a tool to mimic a 6DOF robotic arm movement using Matlab/Simulink.
This can be done by calculating the forward and inverse kinematics.
Approach:
The following tools were used:
- Peter-Corke Toolbox: useful for the study and simulation of classical arm-type robotics, containing functions to represent kinematics, dynamics, and trajectory generation.
- SimMechanics: provides a multi-body simulation environment for 3D mechanical systems.
- 6DOF Arduino Robot Arm: to verify the simulation results.
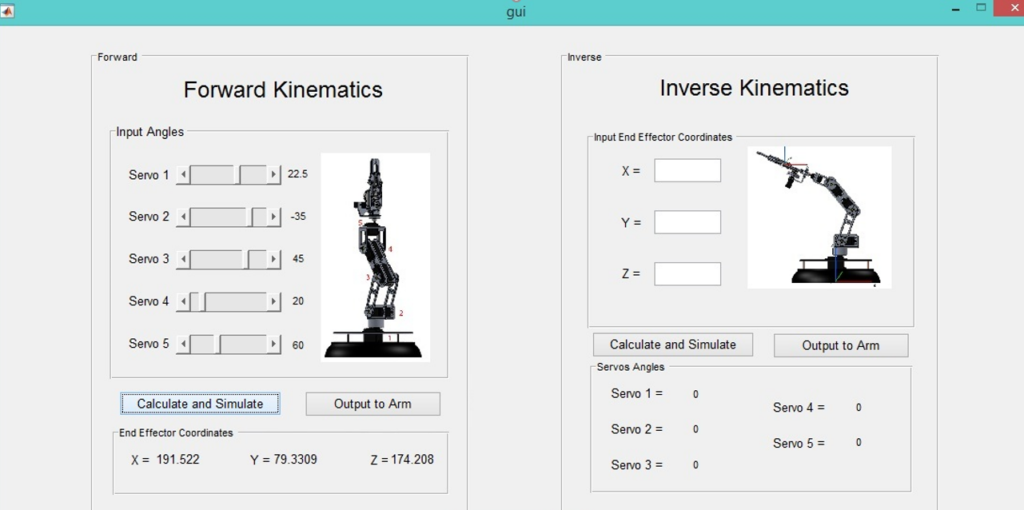
Results Discussion:
Forward kinematics is easy to be calculated using analytical techniques, but inverse kinematics is usually solved by trial and error method. Hence it requires higher computing capabilities than forward kinematics does.