MathWorks
March 2020 – January 2021
Aim:
The use of autonomous vehicles is increasing, and driverless races are starting to take form. This project is aimed at driverless races where a virtual driver could be trained on a virtual racetrack.
So the goal is to combine an existing car model with a racetrack model, programmatically determine the optimal path for the vehicle and tune the suspension/tires of the car for the best possible lap-time.
Tasks:
- Familiarizing with model-based design (focusing on Simscape Multibody, Vehicle Dynamics Blockset, Automated Driving System Toolbox, Mapping toolbox, optimization toolbox)
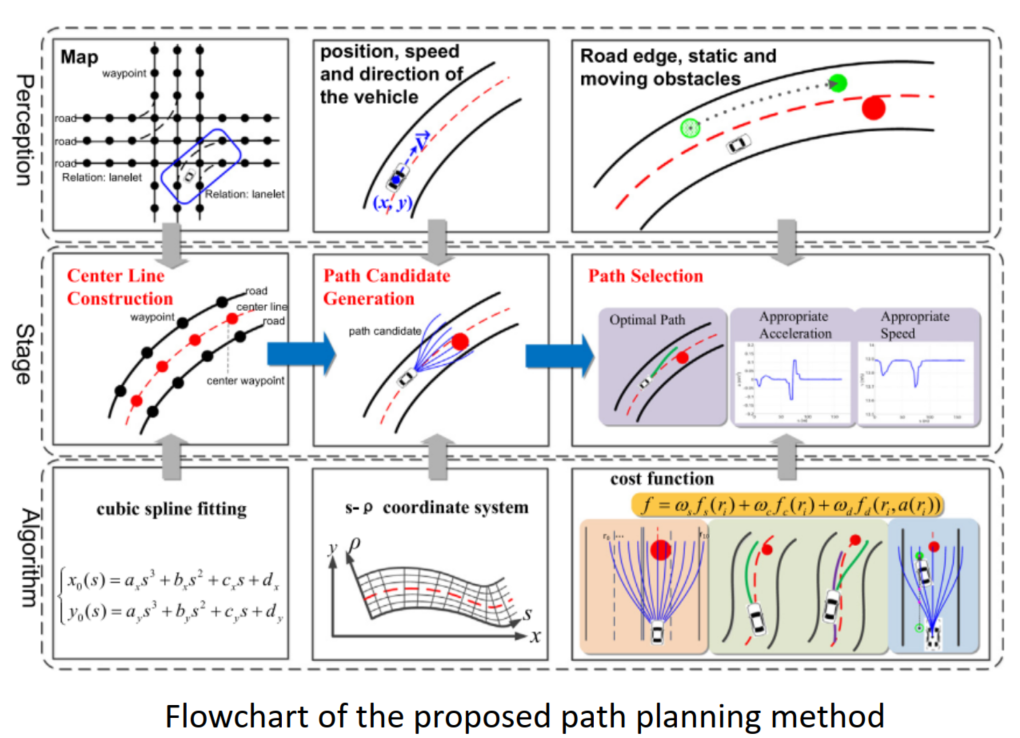
- Use circuit geometry to determine optimal racing line for point mass model.
- Integrating existing high-fidelity vehicle model into race simulator.
- Tune the suspension hard points for better lap times.
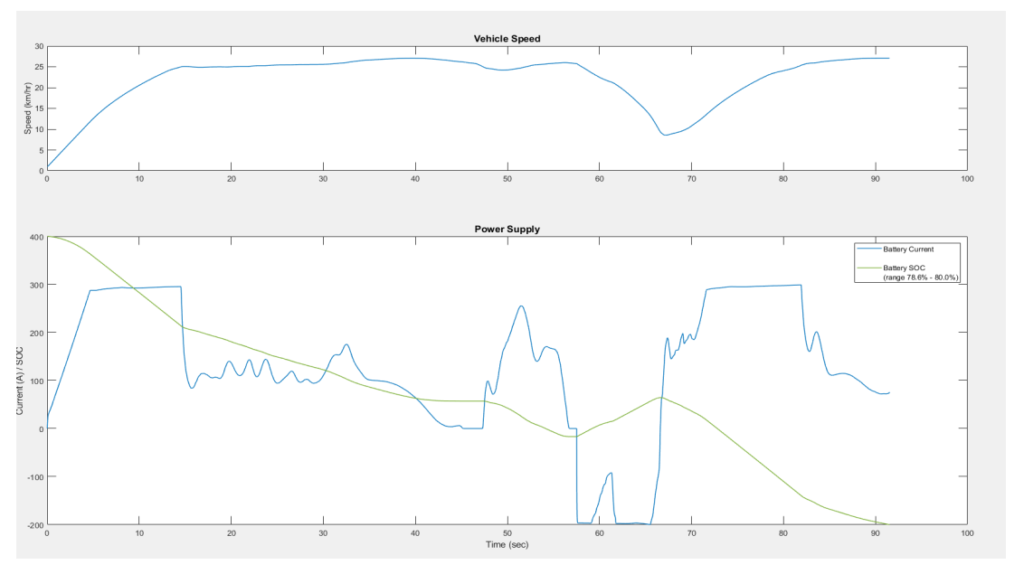
- Optimizing the lap for power consumption.
- Including support for gaming input devices (Gamepad/Steering wheel).
Optimization Methodology:
Global Optimization ToolBox:
- fminunc
- fminsearch
- Simulated Annealing
- Pattern Search
Custom Optimization Algorithms:
- Genetics algorithm
- Simulated Annealing
Results: