Error Estimators for pMOR Training
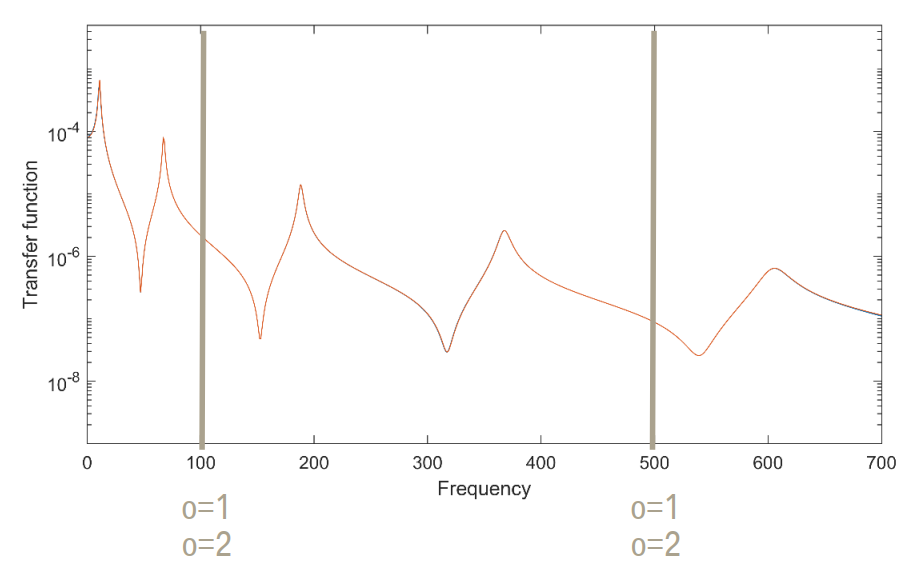
BMW November 2022 – February 2023 The final report can be found on TUM wiki: https://wiki.tum.de/display/modsim/Error+Estimators+for+pMOR
Probabilistic PCA
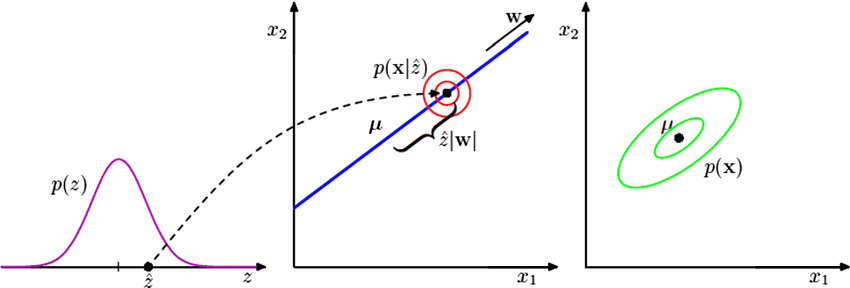
Machine Learning Module June 2021 – July 2021 Aim: A comparison between closed-form results vs Iterative approaches like EM algorithm for: Final Report Content:
Electric Vehicle Race Optimization
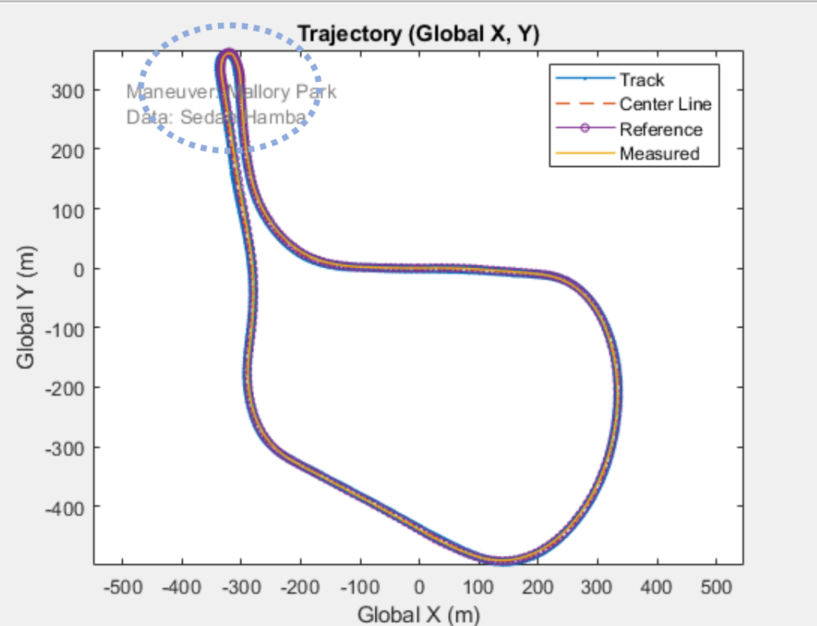
MathWorks March 2020 – January 2021 Aim: The use of autonomous vehicles is increasing, and driverless races are starting to take form. This project is aimed at driverless races where a virtual driver could be trained on a virtual racetrack.So the goal is to combine an existing car model with a racetrack model, programmatically determine […]
Robotics Lab
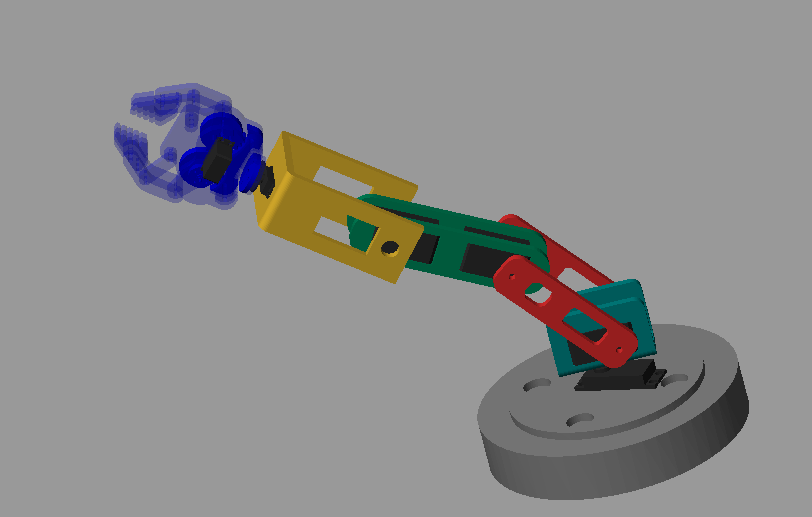
Alexandria University June 2016 – September 2016 Aim: Creating a tool to mimic a 6DOF robotic arm movement using Matlab/Simulink.This can be done by calculating the forward and inverse kinematics. Approach: The following tools were used: Results Discussion: Forward kinematics is easy to be calculated using analytical techniques, but inverse kinematics is usually solved by […]