Robotics Lab
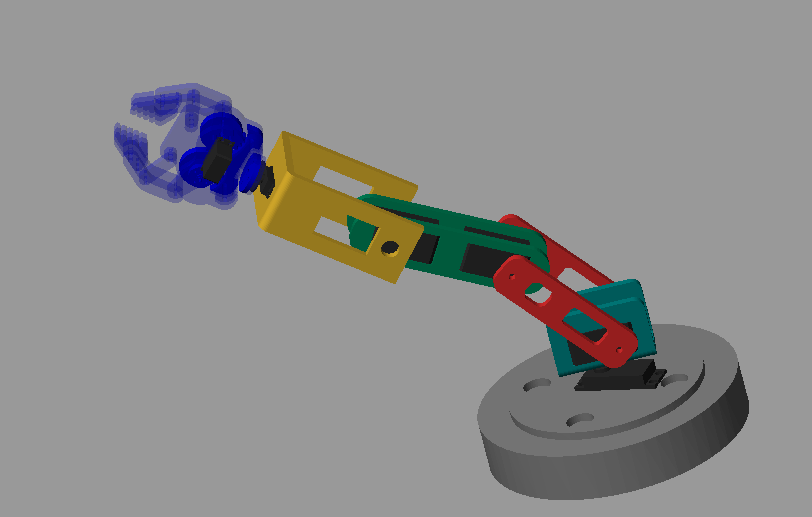
Alexandria University June 2016 – September 2016 Aim: Creating a tool to mimic a 6DOF robotic arm movement using Matlab/Simulink.This can be done by calculating the forward and inverse kinematics. Approach: The following tools were used: Results Discussion: Forward kinematics is easy to be calculated using analytical techniques, but inverse kinematics is usually solved by […]