Electric Vehicle Race Optimization
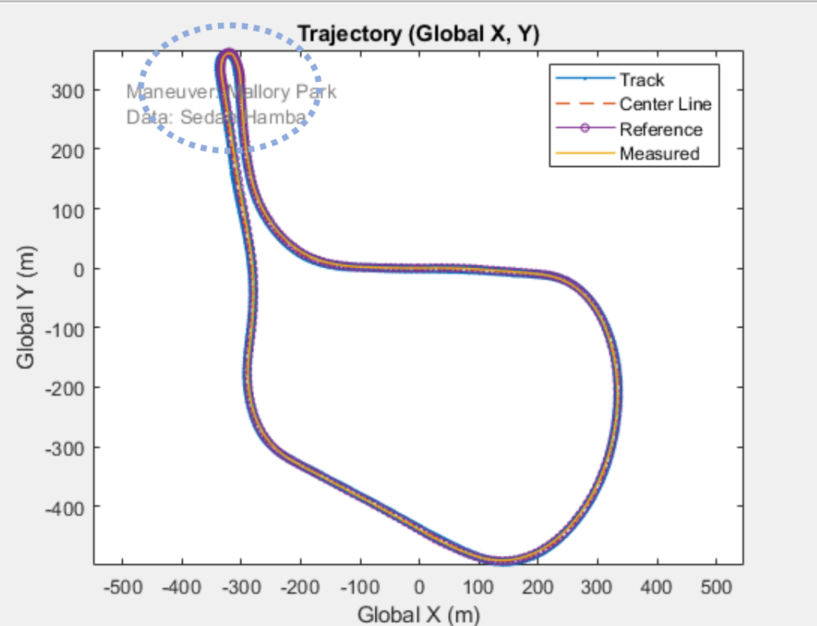
MathWorks March 2020 – January 2021 Aim: The use of autonomous vehicles is increasing, and driverless races are starting to take form. This project is aimed at driverless races where a virtual driver could be trained on a virtual racetrack.So the goal is to combine an existing car model with a racetrack model, programmatically determine […]
Robotics Lab
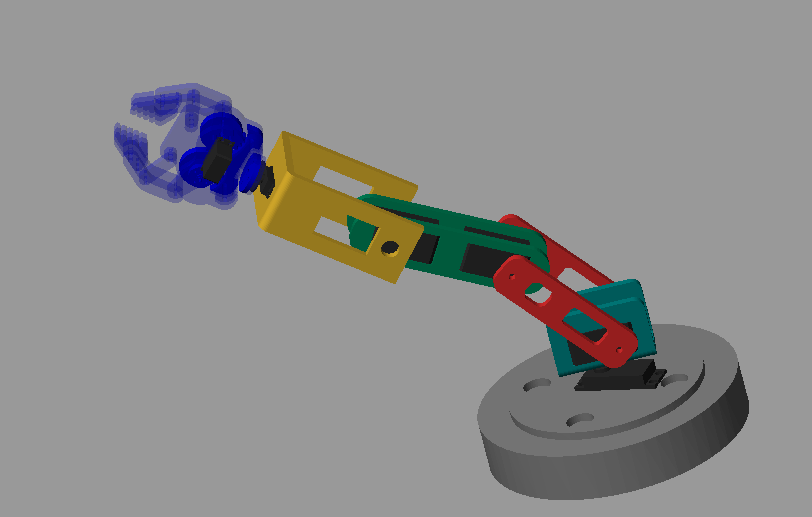
Alexandria University June 2016 – September 2016 Aim: Creating a tool to mimic a 6DOF robotic arm movement using Matlab/Simulink.This can be done by calculating the forward and inverse kinematics. Approach: The following tools were used: Results Discussion: Forward kinematics is easy to be calculated using analytical techniques, but inverse kinematics is usually solved by […]